DB,
The more I think about your PA#6 idea, the more problematic it becomes.
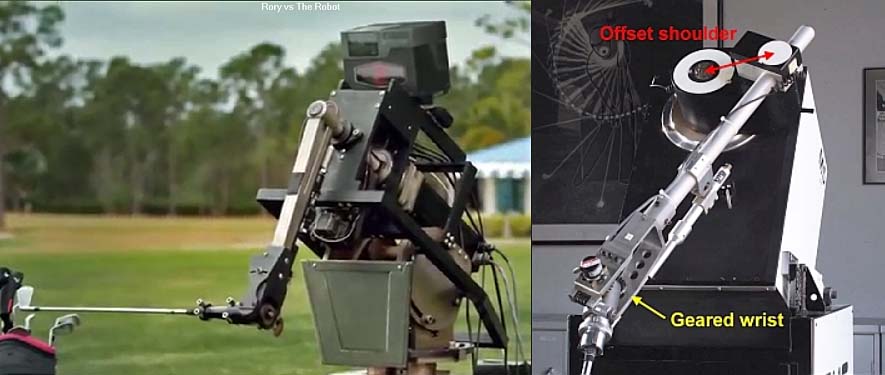
Consider these two golf robots.
The 2nd one has an offset shoulder.
However, they both induce a double pendulum release action where the central arm is released by the motor spinning the central axis spindle and that represents the release of PA#4. Then, the club is released at the peripheral end of the central arm and that represents the release of PA#2.
How can one rationally argue that the 2nd robot has an additional PA simply because of the different structural way that the central arm is attached to the central spindle?
Jeff.
-------------------------------------------------------------------
Dr Mann
Yes, I think both models could be used to induce a double-pendulum release action.
If we looked at Sasho MacKenzie's three lever model below (I copied it off Dave Tutelman's website) , it shows the 4 rotational axis angles below .
To denote the muscular torque at the joint, the Q_ is changed to M_ (e.g., M_Shoulder).

Then he produced a graph below by using forward dynamics (I think ), validated using high speed camera stills on a low handicap golfers swings.

He has definitely separated the power producing torques for M_Torso whereas, in Homer's TGM, I am assuming the following:
M_Shoulder is equivalent to PA4#
M_Wrist is equivalent to PA2#
M_Arm is equivalent to PA3#
There is no PA1# equivalent in Sasho's model (which is a shame)
But where is the PA for the M_Torso?But Tutelman then says the following:
"In short, the four-rotation model refines where the power comes from to create clubhead speed, but it doesn't undo anything we learned from the double-pendulum model about achieving distance.
M_Torso and M_Shoulder combined represent the shoulder torque of the double pendulum, along with the lateral movement of the shoulder pivot. Before, we lumped them together as part of the body's contribution. Now we can separate out the contribution of the left shoulder extending the arm away from the body. But "The Paradox" -- the most counterintuitive lesson from the double-pendulum model -- remains intact.
So yes , it seems that the torques in the structurally different 2nd robot can be summarised to represent the torque in the 1st robot (ie. a double-pendulum motion).
For me personally , I just find it confusing that M_Torso and M_Shoulder have been combined to represent PA4.
DB