|
|
Post by dubiousgolfer on Dec 26, 2019 22:20:10 GMT -5
DG, I do not find your explanations of value because they are vague and unclear and seemingly based on the need to perform certain mathematical calculations - rather than being based on common-sense physical principles. I think very simply about issues relating to "forces" being applied kinetically during a golf swing action. For example, if an on-plane positive force is applied in the alpha plane at P5, then I cannot perceive that it can produce a positive torque relative to the beta plane or a gamma torque that twists the club around its longitudinal axis. The same applies for a positive beta torque that is applied at P5 - I can understand that it can steepen the clubshaft but I cannot perceive that it will produce another positive torque at right angles to the beta plane and result in an increased degree of left wrist uncocking in the alpha plane if the intact LAFW is parallel to the alpha plane; and I also cannot perceive that it will produce a gamma torque that will cause the clubshaft to twist about its longitudinal axis. Jeff. Dr Mann Yes, its unfortunate that the conventions used in physics/mathematics do not sometimes follow common-sense principles (and I have clearly failed in trying to explain them). I'm more inclined to believe that Koike has used 'vector calculus' to create those graphs therefore one cannot use 'common-sense' principles to decipher them (even graph 'a'). I am a bit surprised that Dave Tutelman actually used them to support his article 'Nesbit or Kwon or MacKenzie?' without adding some caveats.DG |
|
|
|
Post by dubiousgolfer on Dec 28, 2019 22:32:24 GMT -5
Dr. Mann, My statement about the reason why the arms/hands slow during release where the clubhead accelerates in a direction different than the direction of the arms/hands is correct. You can even refer to one of Tutelman's swing physics articles that got it right. He further referred to the different directions as "tension" on the shaft. It is for this reason that there is a partial exchange of energy from arms to club. Just by viewing a double pendulum swinging merely under the force of gravity, one can see the phenomenon at work. The physics do not change just because one can choose to "float load." This has nothing to do with "swinger" vs. "hitter." Of course there are forces exerted on the wrist joints because of downswing arm acceleration, or because of "hand pull" as you wrote. As for "swinger" vs. "hitter," my belief is that "swinger" with passive wrists is optimal and that "hitter" introduces forces that negatively affect the rotation and rotational velocity of the club. Interference would be an appropriate word. Thus, I don't bother considering technique or physical forces except in the context of "swinger." S Hi S I was looking at your post again and I think I understand the Tutelman article you are referring to (Rod White's guest article I think). I've tried to draw some force diagrams using that article for a 'Driven Double Pendulum' and a 'Non-Driven Double Pendulum'. The Driven DP is when there is a continuous torque applied to the inner arm (which I will refer to as the left arm of a golfer, pivot point being the left wrist joint) from P4-P7. The Non-Driven DP is when the golfer creates some angular velocity in the early downswing (say from P4-P5) and then stops applying any left arm torque forces. The left arm and club unit (PA#2 intact) is rotating at a particular angular velocity up to release of PA2#. Here is the Diagram for a Driven DP 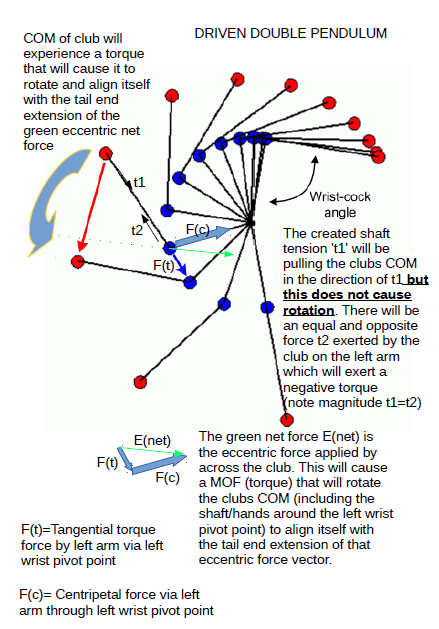 You can see that the centripetal force F(c) vector added to the F(t) vector creates a net eccentric force E(net) . This eccentric force applied across the club will create a torque and 'Release' PA#2 (the angular velocity of the club around the 'left wrist' will increase). The tension in the club shaft will increase due to the diverging motions of the clubhead vs the left wrist joint. The increase tension in the shaft t1 (which I assume you refer to as 'centripetal acceleration' ) will not increase the angular velocity of the club because it is almost in line with the COM. If the COM of the club is not in line with the shaft ,I suspect t1 might assist in restoring any 'lagging ' bend P4-P5.5 (although there will already be some elastic restoring forces happening in the golf shaft). You can also see that there is an equal and opposite force t2 which is the shaft tension pulling on the left wrist joint/arm which will cause a 'negative' torque on the left arm (and work against any 'driven' positive left arm torque). Now here is a diagram for the Non-Driven DP  Note that by the time of release , there is no torque acting on the left wrist joint/arm, therefore no F(t) . But there is still F(c) which is required to keep the 'left arm/club' unit rotating in space. In this scenario , the eccentric force that causes release is F(c) . That is the centripetal force through the left arm. Note that t2 will still act on the left wrist joint/arm to create a negative torque which will decelerate the angular velocity of the left arm. So if I've got these force diagrams correct , there is negative torque exerted on the left arm in both scenarios due to the increased tension in the golf shaft. DG (Note that the force F(t) is not drawn accurately in the first diagram as it should be more tangential to the hub path) |
|
|
|
Post by imperfectgolfer on Dec 29, 2019 0:46:10 GMT -5
DG, Your reasoning doesn't resonate with me. In particular, I don't know why you have invented a t2 force and I don't know why it should be causing a negative torque at left wrist level. I also do not understand why you have to introduce the F(c) force into any calculation needed to determine the magnitude of any PA#2 releasing force. Your explanation is very different to nmgolfer's explanation at nmgolfscience.tripod.com/release.htm I much prefer nmgolfer's reasoning. Consider an analogy - If a child pulls a toy car behind him as he walks, he has to create a positive torque (which I will call t1) where the string meets his trailing hand because the car is inert and it also has has inertia due to its weight and due to the friction between its wheels and the ground. I cannot see the value of claiming that the car is exerting an equal force in the opposite direction (called t2) along the length of the string that creates a negative torque at the same place where a positive torque exists. Jeff. |
|
|
|
Post by dubiousgolfer on Dec 29, 2019 7:48:06 GMT -5
Dr Mann
To be honest , I find nmgolfers explanation completely and utterly confusing. I know that url link was also used by Dave Tutelman but I think it is unclear and vague , especially using this definition below:
"d'Alembert's principle says: the resultant motion of a rigid body is completely defined by the resultant and moment resultant about the mass center of the external forces acting on it."
Figs 3 and 4 are even more baffling , what do they mean ?
You said :
"I cannot see the value of claiming that the car is exerting an equal force in the opposite direction (called t2) along the length of the string that creates a negative torque at the same place where a positive torque exists."
t1 is acting on the car to speed it up
t2 is acting on the hand/arm to slow it down
Both happen at the same time and is Newton's 3rd Law Of Motion .
The reason for t2 in my diagrams is to explain the force element acting on the left arm (via the left wrist joint - ie . through the centre of its fulcrum) which will create a 'negative torque' and try to decelerate the angular velocity of the left arm.
DG
PS. The F(c) force , especially for the 'Non-Driven DP' example, is the only 'real' force I can see acting on the left wrist joint fulcrum (apart from t2). Are there any other forces that can be transferred to the club via the wrist joint to the hands and ultimately to the club handle (especially if the hands are just viewed as clamps)?
|
|
|
|
Post by dubiousgolfer on Dec 29, 2019 8:24:08 GMT -5
I can understand why Syllogist is confused by Rod Whites article below. It's because of the wording (which I have bolded/underlined) which is not explained very well at all. The tension pull on the clubhead through the shaft will only accelerate the club in the direction of the pull (it won't increase its angular velocity). ---------------- Rod White said: We have discussed the golf swing in terms of the conservation of energy and momentum, and showed that the energy is transferred to the club as the swing unfolds, but what actually happens – where are the forces that make this happen?  ![]() The figure shows a ‘stroboscopic’ view of the golf swing. Have a close look at the direction of the clubhead midway through the swing – this is indicated approximately by the red arrow. Now look where the hands move at the same time – the blue arrow: in a different direction! Obviously the hands and clubhead cannot continue to move in different directions, they are restrained by the fixed length of the shaft. The diverging directions of the club and hands results in a large tension in the shaft. The tension pulls against the club head causing it to accelerate, and pulls against the hands causing them to decelerate. It is the differing directions of the hands and club that are ultimately responsible for the energy transfer. In a professional golfer's swing, the tension peaks above 500 N (50 kg equivalent, or over 100 pounds). During this phase of the swing the rate at which energy is transferred to the club peaks at about 5 kW (or almost 7 horsepower). ------------------- DG |
|
|
|
Post by syllogist on Dec 29, 2019 8:57:24 GMT -5
Hi DG,
"There is negative torque exerted on the left arm in both the driven and non-driven double pendulums."
If, in your last sentence, this was the major point that you intended to make, I agree - different directions of arm and clubhead results in negative torque on arm.
I don't know what you meant by a "continuous" torque scenario in the driven double pendulum model except that some degree of applied force to the left arm continues upon release. I only raise this because as I mentioned a few months back, I don't think that such is efficient in terms of allowing for maximum angular velocity of the clubhead during release. We know this is impossible and likely has its own repercussions but, if one were able to instantaneously stop the arm at the release point, maximum angular velocity of the clubhead would result.
S
|
|
|
|
Post by dubiousgolfer on Dec 29, 2019 9:42:18 GMT -5
Hi S
How would one biomechanically and instantaneously stop the left arm?
DG
|
|
|
|
Post by imperfectgolfer on Dec 29, 2019 11:01:26 GMT -5
DG,
You wrote-: "t1 is acting on the car to speed it up
t2 is acting on the hand/arm to slow it down
Both happen at the same time and is Newton's 3rd Law Of Motion .
The reason for t2 in my diagrams is to explain the force element acting on the left arm (via the left wrist joint - ie . through the centre of its fulcrum) which will create a 'negative torque' and try to decelerate the angular velocity of the left arm."
I find it of no value to consider Newton's 3rd law of motion because it is obvious that if a golfer tries to apply a positive torque to uncock his left wrist in order to enact the release of PA#2 that there must be an opposing force working in the opposite direction that will resist the uncocking motion. However, from a cause-and-effect relationship, we use the term "positive torque" being applied at left wrist level during the release of PA#2 because we are interested in "forces" causing the release of PA#2, and not interested in the inertia of the passive club in resisting the release of PA#2.
Every active body, limb or individual joint motion in a golf swing has an impedance to its active motion (according to Newton's 3rd law of motion), but we are mainly interested in how best to actively use many biomechanical motions to perform a golf swing action, and I think that it is of zero value to assert that for every biomechanical motion there must be an equal, and opposite, force resisting the motion. How does that help?
I understand the D'Alembert principle in very simple terms. If a pulling force exerted by the left hand on the club handle is along the longitudinal axis of the clubshaft and therefore straight-in-line with the COM of the club, then the COM of the club will not gain any increased angular momentum. However, if the left hand's pulling force is at an angle to the longitudinal axis, then it will induce the club's COM to acquire increased angular momentum and the magnitude is proportional to the size of that angle.
S,
You wrote-: "We know this is impossible and likely has its own repercussions but, if one were able to instantaneously stop the arm at the release point, maximum angular velocity of the clubhead would result."
I don't know why you believe that if the left hand instantaneously stopped its travel along the hand arc path that it would increase the maximum angular velocity of the clubhead. Why would a sudden cessation of the left hand's motion cause the clubhead to acquire even more angular velocity (as would happen in a towel-snapping action)?
Jeff.
|
|
|
|
Post by syllogist on Dec 29, 2019 11:08:06 GMT -5
Hi DG,
As I stated, it's impossible to stop the left arm. However, I have seen it modeled mathematically to satisfy the researcher's curiosity. The best one can do is to stop applying force. Interesting, in his articles, Dr. Allen has written that arm speed is counterproductive in generating maximum angular acceleration during release and offers that one should "pause" the hands (without biomechanical explanation as to how to accomplish this). This all has to do with shortening the radius of rotation of the clubhead during release so as not to "inhibit" centripetal acceleration.
To continue with this idea, we know that there cannot be anywhere near a perfect "transfer of energy" from arm to club since the negative torque exerted on the arm from the club is not strong enough to completely halt the momentum the arm. His idea of the "pause" is likely counterproductive since one would have to either reach maximum arm acceleration too early or not accelerate the arm enough to attain an ideal peak velocity. In other words, to do either of these two to "pause" the arm would result in decreased angular acceleration during release than if one were just to cease to apply force at the arm upon release.
Although I'm sure that he field tested his theory, it becomes largely anecdotal since one cannot know exactly what one is doing during field testing and what other aspects of the swing have changed, positively or negatively.
S
|
|
|
|
Post by syllogist on Dec 29, 2019 11:18:57 GMT -5
Dr. Mann,
You wrote:
"I find it of no value to consider Newton's 3rd law of motion because it is obvious that if a golfer tries to apply a positive torque to uncock his left wrist in order to enact the release of PA#2 that there be an opposing force working in the opposite direction that will resist the uncocking motion. However, from a cause-and-effect relationship, we use the term "positive torque" being applied at left wrist level during the release of PA#2 because we are interested in "forces" causing the release of PA#2, and not interested in the inertia of the passive club in resisting the release of PA#2.
"
The opposing force to which you refer is one that slows the arms and thus the hands during release; it does not slow angular release of the clubhead. Angular acceleration of the clubhead causes release. Many modelers have noted that positive wrist torque during release increases angular momentum of the clubhead, albeit not impressively. Others have noted have the wrists cannot keep up with angular velocity of the clubhead, meaning that one cannot intentionally uncock them fast enough to make the clubhead move faster. Whichever camp you're in, probably best to keep the wrists passive.
S
|
|
|
|
Post by dubiousgolfer on Dec 29, 2019 12:05:29 GMT -5
Hi S
When you say "The opposing force to which you refer is one that slows the arms and thus the hands during release" , I think you mean slow down the 'pivot point' of the left wrist joint attached to the left arm.
The 'hands' can be thought of as clamps that form part of the clubshaft and they will uncock passively with the 'release of the clubhead/shaft' and therefore will also experience an increase in their angular velocity (with respect to the pivot point on the left wrist joint).
DG
PS. Dave Tutelman has now retired and is going to write a detailed article on 'Release' very soon.
|
|
|
|
Post by imperfectgolfer on Dec 29, 2019 12:50:45 GMT -5
Dr. Mann, You wrote: "I find it of no value to consider Newton's 3rd law of motion because it is obvious that if a golfer tries to apply a positive torque to uncock his left wrist in order to enact the release of PA#2 that there be an opposing force working in the opposite direction that will resist the uncocking motion. However, from a cause-and-effect relationship, we use the term "positive torque" being applied at left wrist level during the release of PA#2 because we are interested in "forces" causing the release of PA#2, and not interested in the inertia of the passive club in resisting the release of PA#2. " The opposing force to which you refer is one that slows the arms and thus the hands during release; it does not slow angular release of the clubhead. Angular acceleration of the clubhead causes release. Many modelers have noted that positive wrist torque during release increases angular momentum of the clubhead, albeit not impressively. Others have noted have the wrists cannot keep up with angular velocity of the clubhead, meaning that one cannot intentionally uncock them fast enough to make the clubhead move faster. Whichever camp you're in, probably best to keep the wrists passive. S I disagree that the opposing force (due to Newton's 3rd law of motion), which DG refers to as t2, slows down the left arm. I believe that the left arm slows down due to the COAM principle, which is not due to the t2 force. When I state that a positive wrist torque causes the release of PA#2 I am not talking about any left forearm muscular action, but I am referring to the passive "effect" of a changing hand arc path (secondary to the release of PA#4) on the left wrist's hinge joint. Jeff. |
|
|
|
Post by syllogist on Dec 29, 2019 16:52:54 GMT -5
Hi DG,
I did mean that the clubhead accelerating in a different direction than that of arm (with hands attached) travel slows the arms (with hands with hands attached).
I view the hands as a "unit" that is a free hinge with cocking and uncocking motions without the need to describe in isolation a left or right wrist and their behavior. However, since the hands are in a cocked position leading to release, it is the uncocking motion of the hands that experiences an increase in velocity. I find it more precise to describe the left arm as accelerating and decelerating since the hand motion is that of "rotating" about the wrist joint.
Although this stuff makes for a fine and dandy discussion, I think that what's important is that one allows for passive uncocking of the wrists and works on torso/arm sequence and torso rotation to passively and "naturally" delay the release. With all this discussion, please tell me that you are well on your way to perfecting that if you haven't already done so. :-)
I look forward to reading new articles by DT in his retirement.
S
|
|
|
|
Post by dubiousgolfer on Dec 29, 2019 20:01:58 GMT -5
Hi S
You might be surprised that I don't use any biomechanical concepts in my swing although I have a general appreciation of 'passive hands/hand path' to optimise release. I don't even hit a ball from Oct - March or practice any aspect of my swing. I usually score between 81 and 86 for 5 months when I start playing and just use 'external focus cues' (using 'Motor Learning Skill' concepts by Dr Gabriele Wulf). My driving is not too bad at all (230-240 yds generally straight) if I swing without any jerky movements and focus on swinging the clubface to an intermediate target (it works for me). Obviously , my short game is rubbish (I'd mark it 4 out of 10) because that really requires a lot of practice especially distance control and judgement on how the ball will react to the clubface in different lies.
I really like Dr Mann's biomechanical explanations which I think make logical sense although I might have a different perspective on the physics of the golf swing which can get overly complicated. I'd prefer 100% confirmation on the physics side because I'd like to know whether a golf instructor is making errors when they use physics to validate certain opinions (ie. 'junk science' as Dr Mann calls it).
For example Mike Jacobs and Manzella are promoting positive torque through impact (and now Bertie Cordle) while others say negative torque (like DT , MacKenzie). I think Tutelman has provided some valid criticisms of Nesbitt's research (used by Jacobs/Manzella) . But could DT and Mackenzie be wrong? Could Koike's 'instrumented grip' research findings be flawed? No doubt it will all become clearer as new research progresses.
DG
|
|
|
|
Post by dubiousgolfer on Dec 29, 2019 22:09:51 GMT -5
Dr. Mann, You wrote: "I find it of no value to consider Newton's 3rd law of motion because it is obvious that if a golfer tries to apply a positive torque to uncock his left wrist in order to enact the release of PA#2 that there be an opposing force working in the opposite direction that will resist the uncocking motion. However, from a cause-and-effect relationship, we use the term "positive torque" being applied at left wrist level during the release of PA#2 because we are interested in "forces" causing the release of PA#2, and not interested in the inertia of the passive club in resisting the release of PA#2. " The opposing force to which you refer is one that slows the arms and thus the hands during release; it does not slow angular release of the clubhead. Angular acceleration of the clubhead causes release. Many modelers have noted that positive wrist torque during release increases angular momentum of the clubhead, albeit not impressively. Others have noted have the wrists cannot keep up with angular velocity of the clubhead, meaning that one cannot intentionally uncock them fast enough to make the clubhead move faster. Whichever camp you're in, probably best to keep the wrists passive. S I disagree that the opposing force (due to Newton's 3rd law of motion), which DG refers to as t2, slows down the left arm. I believe that the left arm slows down due to the COAM principle, which is not due to the t2 force. When I state that a positive wrist torque causes the release of PA#2 I am not talking about any left forearm muscular action, but I am referring to the passive "effect" of a changing hand arc path (secondary to the release of PA#4) on the left wrist's hinge joint. Jeff. Dr Mann - you are correct about the left arm slowing down due to the principle of COAM for the 'non-driven DP' . But the slowing down of the 'left arm' still requires a physical negative torque applied to it (ie. a force applied to the left arm at a distance from the left arm's pivot point - equivalent to the left shoulder joint) and that seems to be shaft tension force pulling on the left arm via the hands (acting as clamps) on the left wrist joint pivot point. In physics we can provide 2 explanations of the left arm slowing down in the 'non-driven DP model' . One is using the concept of COAM and the other using the t2 force, which creates a negative torque at the left shoulder joint. The result is the same. For the 'Driven DP', we cannot use COAM concept to fully explain the left arm slowing (because there are external forces being added to the system by the continued driven left arm torque after release occurs). Here is an extract from Tutelmans website: But there is a constraint on where you can use this modification of the model. The "strobe" diagram on the right below is adapted from the SwingPerfect computer program. The circular path of the hands is clearly apparent as the collection of green and red dots, representing the hands at each "snapshot". I have modified SwingPerfect's diagram to color-code the dots: green while the initial wrist-cock angle is still intact, and red once the club swings out and releases the wrist cock. As long as the wrist cock angle is not changing (green dots), our modeling is quite good. But, once centrifugal force starts to release the clubhead (red dots), accuracy depends on the hands being on the circular path. There are a few reasons:
The double-pendulum model reflects that most of the clubhead speed is due to the release of the wrist cock transferring energy from the hands and arms to the clubhead. How much energy is transferred depends on the curvature of the path of the hands during the release. If we change the path of the hands, we will get a different clubhead speed. So the path of the hands once the wrist angle starts increaing must be the circular path being calculated by the model.
During release (once the wrist angle starts increasing), tension in club's shaft is exerting a force on the hands that slows them down. Notice that means the force is one that opposes the shoulder torque, which is accelerating the hands. But opposing shoulder torque is what moment of inertia does. So, since we are varying the model by playing with moment of inertia, our formula for MOI would need to get a lot more complicated during release in order to reflect this force. Better we get to the circular path before release, so we can use the proper double-pendulum model and a relatively simple formula for moment of inertia.
 As you can see from the bolded underlined sentences , one can explain the left arm slowing using 2 concepts in physics (real 'forces/torques' and COAM which is closely related to redistribution of 'Moment of Inertia').
DG |
|

