I am going to continue to intellectually ruminate on the role of lead foot vertical GRFs in this post, and posit some personal opinions that are flexible and that will probably evolve with the passage of time.
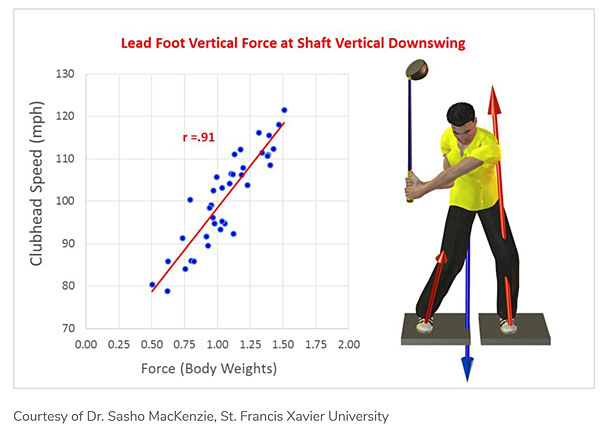
Do you remember this image presented by Sasho (SMK).
Sasho claimed that in his personal study of pro golfers that there was a strong correlation (R value = 0.91) between maximum driver clubhead speed at impact and the magnitude of the lead foot vertical GRF at shaft vertical (~P5.2).
How would a large vertical GRF under the lead foot at P5.2 cause an increase in driver clubhead speed? Sasho never provided an answer and his reasoning was strange.
Sasho stated-: "When we’re swinging a golf club, we have a “learned understanding” of the amount of vertical ground reaction force required to counteract the momentum of the club and keep our body stable. Though it isn’t a conscious thought, we know that we have to push into the ground to keep from falling forward in the swing. If we handed you a much heavier implement like a sledgehammer, there is a decent chance that on the first swing you would underestimate the vertical force required to maintain balance and would end up falling forward. As you became more familiar with swinging a heavier weight like a sledgehammer, you’d do more to prepare for the increased momentum by bracing against the ground (increasing vertical ground reaction force) earlier. This is an extreme example, but it’s a representation of what we’re doing in the golf swing. Before we even begin the downswing, we begin building pressure under our left leg (evidenced by a lateral shift in center of pressure towards the target). Shaft vertical downswing doesn’t represent a peak in this pressure, but it represents a key moment in preparing ourselves for impact."
Sasho stated that the purpose of increasing the vertical GRF under the lead foot very early in the downswing would be a preparatory move that would allow a golfer to stay in balance during the later downswing and at impact. However, how would it increase the driver clubhead speed.
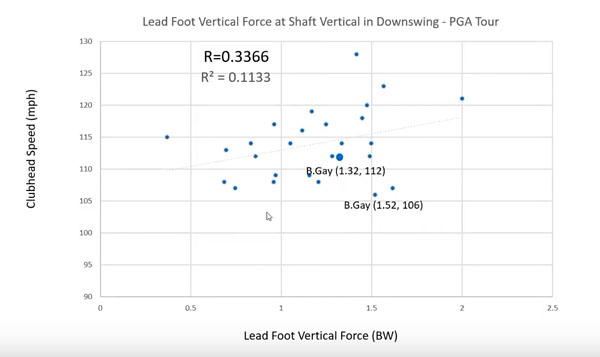
Scott Lynn (Swing Catalyst biomechanist) was amazed at the R value of 0.91 and decided to examine his personal collection of pro golfer lead foot v-GRF results at clubshaft vertical in the early downswing.
This is Scott Lynn's results.
Note the large scatter in results and note that the R value was 0.33, which showed a really low correlation.
Interestingly, Brian Gay, who always had a low driver clubhead speed (compared to other pro golfers) of 106mph at impact managed to increase his clubhead speed as a result of golf instructional coaching to 112mph, but note that his vertical GRF at ~P5.2 actually decreased in magnitude.
So, the question becomes what is the purpose of having a large vertical lead foot GRF in the early downswing if there is a low correlation with driver clubhead speed at impact?
Let's consider Grant Waite's GRFs and torque profile.
Kwon uses Grant Waite (GW) as a role model.
Kwon wants the lead foot v-GRF to be slightly greater than the trail foot v-GRF at address because he believes that it allows a golfer to apply a lead foot horizontal push (where the lead foot push is also directed outwards/targetwards, and not only vertically, which will cause the reactive h-GRF to be directed away from the target).
Then, Kwon likes the fact that GW's trail foot v-GRF reaches its maximum value by P2.6, which will then be followed by a decrease in the trail foot's v-GRF value, and that produces the "unweighting phase" seen between P2.6 => P4.5 (red graph). Kwon suggests that it allows a golfer to apply a "trail side push" targetwards at P2.6. Kwon does not discuss in detail why that trail side push is desirable, and I have a theory as to why GW manifests that pattern.
Look at that avatar of GW and note that his spine is tilted to the left as if he is going to acquire a leftwards-centralised backswing loading position by P4, which is verified by this following capture image from another video produced by David Wednik.
Note that GW has a significant leftwards-centralised backswing loading position at P4.
So, I can understand why he has a trail side push phenomenon happening at P2.6 that will allow him to get to that re-centered P4 position where he is leaning left.
However, I can see no reason why a pro golfer who uses a rightwards-centralised backswing loading pattern needs to manifest that trail side push phenomenon. In fact, I think that he can simply rotate his pelvis clockwise and drive his trail hip joint into internal rotation, while he steadily increases his trail foot's v-GRF to his desired P4-value. I also know of no advantage to having an "unweighting phase" if one uses a rightwards-centralised backswing loading pattern.
Then, going back to Kwon's image of GW's v-GRF pattern, note that GW increases his v-GRF under his lead foot so that it reaches its maximum magnitude at ~P5.2. Kwon calls this a "lead side push" phenomenon.
What is the purpose of that "lead side push" phenomenon?
Let's examine the evolution of GW's torque development during the late backswing and early downswing.
This capture image is at ~P4 when GW is reaching the end of his "unweighting phase".
Note that GW is generating a large amount of torque at this time point. How does he do that if his lead foot's GRF (green graph) and his combined v-GRF (red graph) is very small in magnitude?
The answer can be gleaned from looking at the black COP arrows. Note that his combined COP arrow is closer to his trail foot because the trail v-GRF is still larger than his lead foot's v-GRF. However, although it is not large in magnitude, it is tilted a lot towards the target secondary to the fact that GW is presumably generating a large horizontal GRF under his trail foot that is directed targetwards. Note that he has a large moment arm at this time point despite having a very small lead foot v-GRF, and that allows him to generate a large amount of torque.
This capture image shows GW at his P4.75 position - when he is generating his peak torque.
At this stage, he is generating a lot of v-GRF under his lead foot (see green graph) and that causes the combined COP black arrow to be larger in magnitude and more vertical in orientation. Because the combined COP black arrow is vertical, and because his COM is simultaneously moving slightly targetwards, the moment arm is decreasing in magnitude. In other words, he is using a large amount of v-GRF under his lead foot to allow him to keep generating a counterclockwise torque of his torso around his imaginary COM, in order to compensate for the fact that his moment arm is smaller. This pattern is probably characteristic of a S&T golfer, or a leftwards-centralised backswing loading pattern golfer, who has his spine tilted leftwards and who is still also leaning leftwards as seen in the GW-avatar above.
In other words, I can reasonably understand why a pro golfer, who uses a leftwards-centralised backswing loading pattern and a COM that is located more towards the center of the stance, would need to use a lot of v-GRF under the lead foot at ~P4.75 => P5.2.
However, I suspect that a pro golfer, who uses a rightwards-centralised backswing loading pattern, will not need to generate a large lead foot v-GRF in the early downswing.
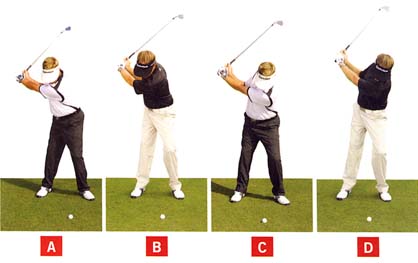
Here is an example of a pro golfer, Gary Woodland, who uses a rightwards-centralised backswing loading pattern with respect to his upper torso and a rightwards loading pattern with respect to his pelvis.
Image 1 is at address. I have drawn red lines vertically upwards from inside his feet.
Image 2 is at P4. Note how his pelvis is right loaded, and that his upper torso is rightwards-centralised loaded at P4.
Here is Gary Woodland's GRF measurements captured by Scott Lynn using the Swing Catalyst force-plate system.
The cyan-colored graph at the bottom is a measure of the vertical GRF.
Note that GW generates very little v-GRF and it is well below the tour average (represented by the black zone).
However, note that he has a large horizontal GRF (magenta colored graph) that is long in duration and it also reaches a large magnitude(well into the tour zone). That will allow him to generate a large rotary torque (that is potentially used to rotate the torso around its COM in the frontal plane) because it will allow him to tilt his combined black arrow targetwards while he is simultaneously keeping his COM from shifting prematurely targetwards (as I demonstrated in my previous post when I analysed Kwon's Player B's GRF/torque pattern development).
Also, note that GW is generating a lot of foot torque (yellow colored graph) that reaches well into the tour zone (black zone). I can imagine that most of his foot torque is generated by the lead foot pushing towards his toes, and not by the trail foot pushing away from his toes (which can produce a hip spinning motion). I obviously have no measurement of the degree that GW is using the muscular contraction of his trail sided lateral pelvic rotator muscles to rotate his pelvis counterclockwise between P4 => P5, but he is in an ideal body alignment position at P4 to use his trail side's pelvic girdle muscle power if he is sufficiently pressure-loading his trail foot.
What is most instructive from my perspective, is that if a pro golfer uses a rightwards-centralised backswing loading technique (like GW), and if he uses a large horizontal GRF to start his downswing (like GW), that he can generate a very large clubhead speed at impact with his driver (like GW) - without needing to generate a large lead foot v-GRF at P4.75 - P5.2 as seen in Grant Waite's golf swing action!
Jeff.