|
|
Post by imperfectgolfer on Aug 16, 2023 12:35:48 GMT -5
Watch this Instagram video featuring Brian Manzella. http://instagram.com/p/CnVCFyHKSX0
In that video BM discusses what one should do with the wrists through impact. BM believes that the lead hand should rotate counterclockwise secondary to lead forearm supination while the trail forearm pronates so that the trail hand can roll over the lead hand after impact (representing what is called a "release swivel action) - and BM poses at the P8.5 position showing the completion of his release swivel action. Here is a capture image from that video of BM showing that P8.5 position.  BM categorically states that all great pro golfers throughout the history of pro golf look like this at the P8.5 position when they are halfway through their followthrough action. I would agree with BM that the majority of pro golfers will use a release swivel action in their later followthrough after P7.5 if they want to get the clubshaft to lie on the swingplane where the butt end of the club often points at the ball-target line (indicating that their clubshaft is on-plane) at the P8.5 position.
However, there are two ways to get to that P8.5 position - where the trail forearm's pronatory action has rolled the trail palm over a supinating left hand.
The one way is to start the release swivel action immediately after P7 so that the release swivel action is completed early before P8. Here are capture images of BM demonstrating that type of rolling subtype of non-DH hand release action through impact. Image 1 is at P6.8 - note that the back of BM's lead hand (glove logo) is still visible immediately pre-impact. Image 2 at P7.2 shows how much his lead hand has rotated counterclockwise through impact secondary to a lead forearm supinatory motion while his trail palm is starting to rotate over the top of the club handle, and that represents the start of his release swivel action, which causes the clubshaft to bypass his lead arm (from an angular rotational perspective) by P7.2. Image 3 shows that BM has completed his release swivel action by P8.
However, many pro golfers do not perform a release swivel action between P7 => P7.5 and they delay it so that it only happens between P7.5 => P8.5. Here is an example - featuring Justin Thomas. Justin Thomas driver swing video. Here are capture images of his followthrough action between P7 => P8.5. Image 1 is at impact. Note that JT has minimal forward shaft lean at impact and he is obviously not using a "handle-dragging" release technique. I have drawn a red line over his lead forearm's lower radial bone and it is rotated counterclockwise about 70 -80 degrees by impact secondary to his PA#3 release action (which is biomechanically due to lead forearm supination) because he uses a weak lead hand grip.
Image 2 is at P7.3. Note that he is not continuing to significantly supinate his lead forearm between P7 => P7.3 (see the angular relationship between that red line and a line drawn down the middle of his lead antecubital fossa). Note that he is allowing his lead humerus to rotate counterclockwise to a small degree and that allows him to keep his clubface square to the clubhead path between P7 => P7.3. Note that the clubshaft has not bypassed his lead arm (from an angular rotational perspective), which means that he is using a DH-hand release action in his early followthrough. Image 3 is at P7.5. Note that he is not continuing to significantly supinate his lead forearm between P7.3 => P7.5 (see the angular relationship between that red line and a line drawn down the middle of his lead antecubital fossa). Note that he is allowing his lead humerus to rotate counterclockwise to a small degree and that allows him to keep his clubface square to the clubhead path between P7.3 => P7.5. Note that the clubshaft has not bypassed his lead arm (from an angular rotational perspective), which means that he is using a DH-hand release action in his early followthrough. Note that JT does not roll his trail palm over the top of his club handle, or over his lead hand, between P7 => P7.5 and his trail palm is mainly behind the aft side of his club handle at P7.5. Image 4 is at P8 when he is starting to fully straighten his trail wrist and also starting to pronate his trail forearm so that his trail hand is now starting to roll counterclockwise over his supinating lead hand - and that represents the start of his release swivel action, which is fully completed by P8.5 (image 5). However, JT does not perform a release swivel action between P7 => P7.5 and he delays it so that it only starts after P7.5.
Delaying the release swivel action so that it only happens after P7.4 does not mean that a pro golfer is using a "handle-dragging" hand release technique that restricts the full release of the club and it only means that he is likely using a DH-hand release action rather than a non-DH hand release action. BM is seemingly oblivious of the differences between a "handle-dragging" release action and a DH-hand release action. BM is also seemingly ignorant of the biomechanical differences between a rolling subtype of non-DH hand release action and a DH-hand release action.
Jeff.
|
|
|
|
Post by imperfectgolfer on Aug 16, 2023 13:19:16 GMT -5
|
|
|
|
Post by imperfectgolfer on Aug 17, 2023 10:49:06 GMT -5
An intellectual question that intrigues me is why prominent golf instructors - like Jon Sinclair and Brian Manzella - cannot understand why it is possible to have a quiescent phase (from a lead forearm supinatory motion perspective) between the rapid lead forearm supinatory motion happening during a PA#3 release action and the rapid lead forearm supinatory motion happening during a release swivel action. Jon Sinclair has stated that he cannot envisage that it is biomechanically possible to temporarily slow down the speed of lead forearm supination (that happens between P6.5 => P7 during a PA#3 release action), so that the rate of lead forearm supination decreases dramatically between P7 => P7.4 before then speeding up again post-impact during the execution of a release swivel action. Here are capture images of Justin Thomas's PA#3 release action. Image 2 is at P6.7 (which is about 18" before the clubhead reaches impact). Note that the back of JT's lead hand is facing the ball-target line and his lead forearm's lower radial bone is roughly parallel to the ball-target line. Image 3 is at impact where the back of JT's lead hand and his lead lower forearm's lower radial bone have rotated ~70 degrees between P6.7 => P7 while the clubhead has traveled a distance of 18" along the clubhead path at a very fast speed of >100mph. That obviously means that the speed of lead forearm supination, which is casually responsible for the counterclockwise rotation of the lead hand, is happening very fast between P6.7 => P7. However, when you look at his speed of lead forearm supination happening between P7 (image 3) and P7.4 (image 4) by evaluating the rate of rotation of his lead forearm's lower radial bone relative to the middle of his lead elbow's antecubital fossa (elbow pit), you can see that it must be very slow - and that allows JT to prevent the clubshaft from bypassing his lead arm (from an angular rotational perspective) between P7 => P7.4 and it allows him to keep his clubface square to his clubhead path between P7 => P7.4. The opposite scenario to JT's DH-hand release action can be seen in this video of Christina Ricci demonstrating her "lighting fast" roller hand release action. Note that CR states that the release of PA#3 plus the release swivel action that causes a counterclockwise rotation of the lead hand must be completed between the two thighs, so that by the time her hands bypass her lead thigh, the release swivel action must already be completed.
That is the antithesis of what is happening in Justin Thomas' driver golf swing action. Image 1 is at impact, and we know that his clubshaft was rotating very fast (around its longitudinal axis) between P6.7 => P7.
However, his rate of clubshaft rotation around its longitudinal axis is very slow between P7 => P7.4 before it speeds up dramatically between P7.4 => P8.5 as he performs his release swivel action, which only starts after P7.4.
What enables JT to separate the rapid lead forearm supination phase happening between P6.7 => P7 (representing the release of PA#3) from the rapid lead forearm supination phase happening between P7.4 => P8.5 (representing the release swivel action) with a quiescent phase where there is a negligible rate of lead forearm supination happening between P7 => P7.4? How does JT achieve this from a biomechanical perspective, which makes a DH-hand release action biomechanically possible?
There are a number of principles that make it biomechanically possible. 1) First of all, JT does not attempt to fling the clubhead passed his hands through impact - as BM recommended in that Instagram video. 2) Secondly, JT does not attempt to actively induce a rapid PA#3 release action using a very actively forceful lead forearm supinatory muscular force (combined with a very actively forceful trail forearm pronatory muscular force) with the intention of completing both the PA#3 release action and the release swivel action by the time his lead arm just bypasses his lead thigh. What JT is really doing is executing an intact LFFW/GFLW golf swing action between P4 => P7 while letting the PA#3 release action happen passively/naturally using no lead forearm supinatory force/trail forearm pronatory force.
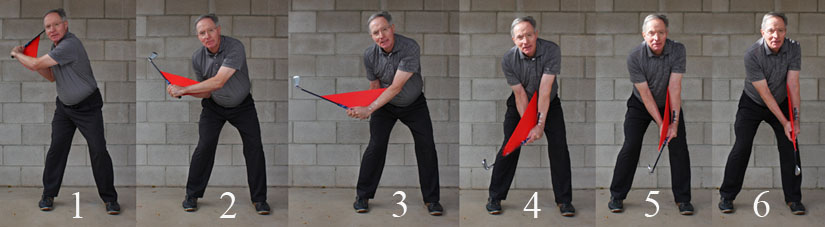
Here is my demo - in "artificial" slow motion - showing the intact LFFW/GFLW concept. Image 1 is at P4, image 2 is at P5.2, image 3 is at P5.5, image 4 is at P6.5, image 5 is at impact (where I have the desired amount of forward shaft lean due to expertly controlling the rate of counterclockwise rotation of the intact LFFW during the PA#3 release action) and image 6 is at P7.1 (where I have an intact LAFW as well as an intact LFFW).
The red piece of cardboard represents the "idea" of an intact LFFW where the clubshaft is continuously straight-line-aligned with my lead lower forearm's lower radial bone (see short piece of black tape placed over my lead lower forearm's lower radial bone) throughout the entire downswing and early followthrough. Justin Thomas is using the intact LFFW/GFLW swing technique in his driver swing action between P4 => P7. Then, when the clubshaft becomes straight-line-aligned with both his lead forearm and lead upper arm at ~P7 - P7.1, he maintains an intact LAFW alignment between P7.1 => P7.4+ by ensuring that the lead arm's angular velocity is perfectly matched with the clubshaft's angular velocity and by ensuring that the entire LAFW (lead arm + clubshaft) rotate counterclockwise at the same rotary speed that allows the clubhead to remain square relative to the clubhead arc between P7.1 => P7.4+. Then, after P7.4 he transitions into a release swivel action, which requires a lot of lead forearm supinatory motion over a short period of hand travel distance between P8 => P8.5. What makes it physically/biomechanically possible to separate the rapid lead forearm supinatory phase of the PA#3 release action from the rapid lead forearm supinatory phase of the release swivel action are the biomechanical actions bold-highlighted in the previous paragraph, and which can be clearly seen in images 1, 2 and 3 of the following capture images. Jeff.
|
|
janik
Full Member

Posts: 143
|
Post by janik on Aug 17, 2023 18:56:58 GMT -5
Hi Dr. Mann,
If I may, I would like to push back on your points in order to extract some more thoughts from you.
In my mind, it is basically proven that the PA#3 release is not entirely passive due to the fact that there is a spectrum of ultra strong (Matt Fitzpatrick) to ultra weak (John Rahm) grip types. If this is accepted, then there must be some form of torque being applied/prevented to the closing of the face relative to the path.
Therefore, I would argue, it is viable that a consistent roll release of ~180 deg through impact is as effective as your DH proposal of roll by ~90 deg then apply braking torque from P7 to ~ P7.5. If one were to build a mechanical solution to consistently square PA#3 then I doubt they would choose the latter solution. I believe golf robots go for the former design of a consistent rolling release.
Cheers
Janik
|
|
|
|
Post by imperfectgolfer on Aug 17, 2023 19:41:03 GMT -5
Hi Dr. Mann, If I may, I would like to push back on your points in order to extract some more thoughts from you. In my mind, it is basically proven that the PA#3 release is not entirely passive due to the fact that there is a spectrum of ultra strong (Matt Fitzpatrick) to ultra weak (John Rahm) grip types. If this is accepted, then there must be some form of torque being applied/prevented to the closing of the face relative to the path. Therefore, I would argue, it is viable that a consistent roll release of ~180 deg through impact is as effective as your DH proposal of roll by ~90 deg then apply braking torque from P7 to ~ P7.5. If one were to build a mechanical solution to consistently square PA#3 then I doubt they would choose the latter solution. I believe golf robots go for the former design of a consistent rolling release. Cheers Janik The fact that there is spectrum of lead hand grip strengths - weak, neutral, moderately strong, strong - does not mean that the PA#3 release action cannot be passive in each scenario. If a golfer adopts a weak lead hand grip, then he will be pronating his lead forearm more between P1 => P4 to get the back of his lead hand to become parallel to the swingplane at P4. He will, therefore, naturally have more lead forearm supination happening passively during his PA#3 release action. By contrast, if he adopts a strong lead hand grip, he will use far less lead forearm pronation between P1 => P4 in order to get the back of his lead hand parallel to the swingplane at P4. He will, therefore, naturally have far less lead forearm supination happening passively during his PA#3 release action. In both scenarios, the required amount of PA#3 release action is passive and automatic/natural and no active muscular torque is required. I do not know why you are assuming that a braking torque is needed during the P7 => ~P7.5 time period in a DH-hand release action. There is zero need for any torque to brake the lead forearm's supinatory motion after P7 if the PA#3 release action is completed by P7 because the lead forearm will get back to its resting state (address position state) at P7 if the PA#3 release action is naturally passive, and not actively forced. The clubshaft will obviously have gained a lot of targetwards momentum by P7, but it will not have any natural/automatic tendency to keep on rolling counterclockwise between P7 => P7.4 if a golfer matches the angular velocity of his lead arm to the angular velocity of the clubshaft and if he simultaneously controls the lead arm/clubshaft unit's counterclockwise roll rate by controlling the rate of rotation of the entire LAFW unit between P7 => ~P7.4. After P7.4, he will have to apply an active lead forearm supinatory torque if he wants to direct the motion of the clubshaft so that it becomes parallel to the swingplane by P8 - P8.5+, but that represents a "release swivel action" (which is an optional choice, and not an obligatory choice).
The disadvantage of transitioning immediately from a PA#3 release action into a release swivel action - as recommended by Christina Ricci, who recommends a ~180 lead forearm supinatory motion happening non-stop between ~P6.5 => ~P7.4 - is the fact that the clubface will have a high ROC through impact.
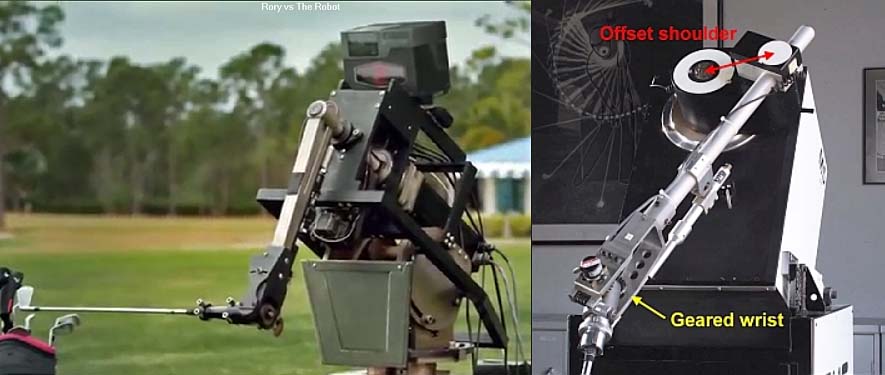
In a golf robot, there is no ability to control the rate of counterclockwise rotation of the clubshaft between P7 => P7.4 and it will likely behave similar to the RYKE model as seen in the video below if the hinge joint between the central arm and clubshaft is similar in design/behaviour to the RYKE model's passive rotary joint inbuilt into the end of the central arm and if a RYKE angle is also inbuilt into the golf robot model. Here are two golf robots where the clubshaft and central arm are straight-line-aligned. That type of robot design creates a very small accumulator #3 angle, so I presume that the clusbhaft will continue to rotate non-stop around its longitudinal axis through impact creating a high clubface ROC through impact.
Some golf robots do not have any rotary hinge joint at the hinge-joint junction between the central arm and the club handle, and there is no rotary motion of the clubshaft happening between P1 => P4, or between P4 => P7 in that type of golf robot design - the clubhead remains continuously square to the clubhead path between P1 => P7. There is therefore zero clubface ROC through impact if there is no flipping motion through impact.
Jeff.
|
|
|
|
Post by imperfectgolfer on Aug 17, 2023 23:26:00 GMT -5
I have learned something new. Janik wrote-" Therefore, I would argue, it is viable that a consistent roll release of ~180 deg through impact is as effective as your DH proposal of roll by ~90 deg then apply braking torque from P7 to ~ P7.5. If one were to build a mechanical solution to consistently square PA#3 then I doubt they would choose the latter solution. I believe golf robots go for the former design of a consistent rolling release." Janik inferred that a Golf Robot would have the clubshaft continuing to rotate counterclockwise through impact (= consistent roll release phenomenon).
I assumed that he could probably be correct if the Golf Robot's design had the clubshaft straight-line-aligned with the central arm (= zero accumulator #3 angle at impact). However, my assumption is incorrect. Here is a video showing a Golf Robot testing a persimmon driver. Between the 0:47 - 0:51 minute time point of the video, there is a slow motion video piece showing how the clubface is open at P4 by 90 degrees but then square at impact, which means that the clubface must have rolled counterclockwise by 90 degrees between P4 => P7. What is really interesting is this capture image of the clubhead about 12" post-impact. Note that the clubface is still square to the clubhead path and there has been no automatic/natural counterclockwise rotation of the clubshaft through impact (as Janik predicted). It appears as if the Golf Robot is designed to keep the clubface square to the clubhead path post-impact if the ball is hit by the clubface's sweetspot - like a DHer!
Addendum added later: I found this other video of the same Golf Robot testing a TaylorMade M3 driver. You can clearly see that the clubface does not roll counterclockwise through impact. I presume that ball-clubface collision can also affect the behaviour of the clubhead after impact via the GEAR effect and it can potentially over-ride any tendency of the clubface to continue to rotate counterclockwise uninterruptedly through impact (as Janik predicted). In fact, there is one swing where the GEAR effect causes the clubface to rotate more open after impact - presumably due to an off-center strike.
Jeff.
|
|
|
|
Post by dubiousgolfer on Aug 18, 2023 6:55:05 GMT -5
Dr Mann
If you look closely at those robot videos , I think they have restricted the robots ability to rotate about the longitudinal axis of the arm through impact for several feet to even slightly past P8 (ie. they have restricted the clubface to be square to path).
DG
|
|
janik
Full Member
Posts: 143
|
Post by janik on Aug 18, 2023 12:22:19 GMT -5
Hi Dr. Mann
Thanks for the detailed reply.
Regarding your paragraph;
“If a golfer adopts a weak lead hand grip, then he will be pronating his lead forearm more between P1 => P4 to get the back of his lead hand to become parallel to the swingplane at P4. He will, therefore, naturally have more lead forearm supination happening passively during his PA#3 release action. By contrast, if he adopts a strong lead hand grip, he will use far less lead forearm pronation between P1 => P4 in order to get the back of his lead hand parallel to the swingplane at P4. He will, therefore, naturally have far less lead forearm supination happening passively during his PA#3 release action. In both scenarios, the required amount of PA#3 release action is passive and automatic/natural and no active muscular torque is required.”
It makes no sense to me that the lead arm should return to its address level of pronation/supination at impact. I can’t see any logical or biomechanical reason for it doing so. Indeed the fact that even pro golfers hit wild offline shots proves that it is not a predictable aspect of the golf swing.
|
|
|
|
Post by imperfectgolfer on Aug 19, 2023 10:16:28 GMT -5
Hi Dr. Mann Thanks for the detailed reply. Regarding your paragraph; “If a golfer adopts a weak lead hand grip, then he will be pronating his lead forearm more between P1 => P4 to get the back of his lead hand to become parallel to the swingplane at P4. He will, therefore, naturally have more lead forearm supination happening passively during his PA#3 release action. By contrast, if he adopts a strong lead hand grip, he will use far less lead forearm pronation between P1 => P4 in order to get the back of his lead hand parallel to the swingplane at P4. He will, therefore, naturally have far less lead forearm supination happening passively during his PA#3 release action. In both scenarios, the required amount of PA#3 release action is passive and automatic/natural and no active muscular torque is required.” It makes no sense to me that the lead arm should return to its address level of pronation/supination at impact. I can’t see any logical or biomechanical reason for it doing so. Indeed the fact that even pro golfers hit wild offline shots proves that it is not a predictable aspect of the golf swing. Janik wrote-: " It makes no sense to me that the lead arm should return to its address level of pronation/supination at impact. I can’t see any logical or biomechanical reason for it doing so. Indeed the fact that even pro golfers hit wild offline shots proves that it is not a predictable aspect of the golf swing" I have been writing about the golf swing biomechanics/mechanics used by pro golfers for ~17 years and I have spent 10,000 - 20,000 hours writing about the topic. I am frequently disappointed when I realize that many people, who have actually read some of my work output, have never understood my opinions. Janik wrote that he cannot think of any logical reason for the lead arm's level of pronation/supination returning to its address level at impact - an opinion that stuns me because I harbor the totally opposite opinion. I cannot fathom how a pro golfer, who uses a TGM swinging technique, can get to impact with a greater/lesser amount of PA#3 release action than the amount that is appropriate for the magnitude of his lead hand grip strength - and still hope to have a square clubface at impact, which is a necessary requirement for hitting the ball straight.
Many pro golfers prefer to hit the ball straight at the their target (especially when hitting iron approach shots) and a straight ball flight requires that a golfer zero-out the clubhead path and clubface angle at impact while striking the ball with the sweetspot of the clubface. If a pro golfer uses a TGM swinging action, involving the sequential release of PA#4 => PA#2 => PA#3, then each power release phase has to perfected to get the clubshaft at impact to have a desirable amount of forward shaft lean and the clubface to be square. Most pro golfers (who generate a straight ball flight) will get to the P6 position (which is also called the "delivery position") with their clubshaft parallel to the ball-target line and parallel to the ground. Then, the sequential release of PA#2 and PA#3 will result in a square clubface at impact if they are performed perfectly. Here is Justin Thomas PA#3 release action. Image 1 shows JT at the delivery position with his clubshaft parallel to the ground and parallel to the ball-target line. The back of his lead hand is parallel to the ball-target line. Image 3 shows JT with a square clubface at impact, and that necessitated a ~70 degree counterclockwise rotation of the back of his lead hand. He cannot have more-or-less counterclockwise rotation of his lead hand and hope to have a square clubface at impact. What makes it biomechanically easier for the correct amount of lead forearm supination (~70 degrees) to happen between P6 => P7 is the fact that JT uses a weak lead hand grip, where his degree of lead forearm supination is *roughly the same at impact as it was at address.
(* it is not exactly the same if there is forward shaft lean at impact or if the lead humerus is rotated to a different degree at impact compared to address). Here is Viktor Hovland's PA#3 release action
Image 1 shows VH at the delivery position with his clubshaft parallel to the ground and parallel to the ball-target line. The back of his hand is parallel to the ball-target line. Image 4 shows VH at impact with a square clubface where the back of his lead hand has rotated ~45 degrees counterclockwise between P6 => P7 due to his PA#3 release action. He cannot have more-or-less counterclockwise rotation of his lead hand and hope to have a square clubface at impact. What makes it biomechanically easier for the correct amount of lead forearm supination (~45 degrees) to happen between P6 => P7 is the fact that VH uses a moderately strong lead hand grip, where his degree of lead forearm supination is *roughly the same at impact as it was at address.
(* it is not exactly the same if there is a different amount of forward shaft lean at impact or if the lead humerus is rotated to a different degree at impact compared to address). Janik wrote-: "Indeed the fact that even pro golfers hit wild offline shots proves that it is not a predictable aspect of the golf swing."
I never inferred that performing the appropriate amount of PA#3 release action (which is inversely proportional to lead hand grip strength) needed to get a square clubface at impact is a predictable phenomenon in a pro golfer's golf swing action. Nothing in the golf swing action is predictable and if any biomechanical facet (eg. pivot action, release of PA#4, release of PA#2, release of PA#3) of the golf swing action is imperfectly performed, then it could potentially result in wild offline shots.
Jeff.
|
|
janik
Full Member
Posts: 143
|
Post by janik on Aug 19, 2023 10:43:32 GMT -5
Hi Dr. Mann,
You completely misunderstood my point.
I absolutely understand and agree that a golfer must return the appropriate level of lead arm pronation/supination to hit with a square club face and that this is relative to their grip strength.
My point or question is how this can happen passively, and consistently so.
My point is probably better made with a couple of extreme examples: Matt Fitzpatrick and John Rahm:
Fitzpatrick hardly pronates his lead arm in the back swing (for argument sake) and hardly supinates into impact.
Rahm very much pronates his lead arm in the back swing (as you explained above this is needed to keep the shaft on plane) and very much supinates coming into impact.
I am sure we both agree on that.
However, I can see no reason why the following extreme example can’t happen:
Fitzpatrick hardly pronates as normal, then supinates significantly into impact, resulting in a “duck hook” shot.
Rahm pronates as normal, then fails to supinate into impact, causing a “sliced” shot.
I absolutely understand that both golfers would need to correct this PA#3 release in order to hit a straight shot. But by doing so I would therefore put to you that this becomes a conscious and active manoeuvre and NOT a passive one. I can’t understand how an action can be described as Passive and also be evident at two extremes in the real world ie strong to weak grips thus little to lots of supination.
If it was truly Passive, then there is no reason (that I can see) that duck hooks and wild slices would occur.
|
|
|
|
Post by imperfectgolfer on Aug 19, 2023 11:49:35 GMT -5
Hi Dr. Mann, You completely misunderstood my point. I absolutely understand and agree that a golfer must return the appropriate level of lead arm pronation/supination to hit with a square club face and that this is relative to their grip strength. My point or question is how this can happen passively, and consistently so. My point is probably better made with a couple of extreme examples: Matt Fitzpatrick and John Rahm: Fitzpatrick hardly pronates his lead arm in the back swing (for argument sake) and hardly supinates into impact. Rahm very much pronates his lead arm in the back swing (as you explained above this is needed to keep the shaft on plane) and very much supinates coming into impact. I am sure we both agree on that. However, I can see no reason why the following extreme example can’t happen: Fitzpatrick hardly pronates as normal, then supinates significantly into impact, resulting in a “duck hook” shot. Rahm pronates as normal, then fails to supinate into impact, causing a “sliced” shot. I absolutely understand that both golfers would need to correct this PA#3 release in order to hit a straight shot. But by doing so I would therefore put to you that this becomes a conscious and active manoeuvre and NOT a passive one. I can’t understand how an action can be described as Passive and also be evident at two extremes in the real world ie strong to weak grips thus little to lots of supination. If it was truly Passive, then there is no reason (that I can see) that duck hooks and wild slices would occur. Janik, Consider these opinions that you expressed. " However, I can see no reason why the following extreme example can’t happen:
Fitzpatrick hardly pronates as normal, then supinates significantly into impact, resulting in a “duck hook” shot. Rahm pronates as normal, then fails to supinate into impact, causing a “sliced” shot." You stated that you can see no reason why those extreme examples cannot happen. Why should they happen if those two skilled pro golfers want to have a square clubface at impact so that they can hit the ball straight? I do not think that either of those two pro golfers consciously think of the amount of lead forearm supination that they must enact to get a square clubface at impact. They only consciously think of getting their clubface square at impact - but they do not consciously know what biomechanical actions are needed to achieve that desirable goal and therefore it does not happen actively/intentionally.
For Matthew Fitzpatrick to use more lead forearm supination in his PA#3 release action than the very small amount that is necessary to get a square clubface at impact, he would have to be doing "something" actively in terms of increasing his degree of lead forearm supination than the comfortable amount than can passively happen at a subconcious level where the amount of lead forearm supination at impact ends up being roughly equal to the amount that existed at address. Why would Matthew consciously/actively perform an extra amount of lead forearm supination between P6 => P7 if he noted that it resulted a markedly closed clubface at impact? Of course, it may happen unintentionally due to an unintended biomechanical action involving his trail arm where the trail arm straightens too fast and where the trail forearm simultaneously pronates too much between P6 => P7 - but that would not be a consciously deliberate action, and it would be an unintentional swing fault. The amount of PA#3 release action used by a pro golfer between P6 => P7 is based on "feel" acquired during years of good quality ball-striking and Matthew (who uses a very strong lead hand grip) is probably unaware on a conscious level of the amount of lead forearm supination that is actually happening between P6 => P7. An unintentional swing fault (eg. incorrect amount of PA#3 release action) can always occur, but it should happen much more infrequently in skilled pro golfers like Matthew Fitzpatrick and Jon Rahm.
Jeff.
|
|
janik
Full Member
Posts: 143
|
Post by janik on Aug 19, 2023 13:44:00 GMT -5
Hi Dr. Mann,
Your statement:
“The amount of PA#3 release action used by a pro golfer between P6 => P7 is based on "feel" acquired during years of good quality ball-striking…”
Is what I was getting at and is exactly what my intuition and logic tell me is happening.
While a skilled golfer may not be consciously thinking of lead arm supination rate into impact, it is not true that it is a “passive” consequence that is deterministic and requires no skill. It is analogous to a race car driver correcting a steering wheel at high speed.
Maybe I can admit that I misinterpreted your definition of “passive” but to me it implies something that happens without any need for skill.
Cheers
|
|
|
|
Post by imperfectgolfer on Aug 19, 2023 15:12:37 GMT -5
Hi Dr. Mann, Your statement: “The amount of PA#3 release action used by a pro golfer between P6 => P7 is based on "feel" acquired during years of good quality ball-striking…” Is what I was getting at and is exactly what my intuition and logic tell me is happening. While a skilled golfer may not be consciously thinking of lead arm supination rate into impact, it is not true that it is a “passive” consequence that is deterministic and requires no skill. It is analogous to a race car driver correcting a steering wheel at high speed. Maybe I can admit that I misinterpreted your definition of “passive” but to me it implies something that happens without any need for skill. Cheers
I actually do think of the PA#3 release action as being a passive consequence that requires no conscious skill - it is a passive consequence of a golfer performing a lead forearm pronatory action during the backswing, which takes the lead forearm out of its resting state at address => then while a PA#2 release action is happening in the later downswing a counterclockwise rotation of the clubface happens passively as the left forearm rotates back to the state it was in at address. If a very small adjustment in the degree of lead forearm supination is automatically/naturally made to produce the desired amount of forward shaft lean at impact in a golfer who uses a weak-neutral lead hand grip combined with an intact LFFW technique, it is based on the acquired "feel" that a skilled golfer instinctively performs without deliberate conscious thought.
Jeff.
|
|
janik
Full Member
Posts: 143
|
Post by janik on Aug 19, 2023 15:33:47 GMT -5
Hi Dr. Mann,
Then let’s agree to disagree.
I assert that if lead forearm supination is a passive deterministic action that does not require mastery then wild shots would be unlikely by amateurs and pros alike. Alas we know the need for a scorecard proves my point.
Cheers
|
|
|
|
Post by imperfectgolfer on Aug 19, 2023 17:15:24 GMT -5
Hi Dr. Mann, Then let’s agree to disagree. I assert that if lead forearm supination is a passive deterministic action that does not require mastery then wild shots would be unlikely by amateurs and pros alike. Alas we know the need for a scorecard proves my point. Cheers I have no problem agreeing to disagree. By the way, I think that wild shots are much more likely to be due to swing factors that interfere with the passive release of PA#3! Mastering the PA#3 release action requires a lot of skill - skill in avoiding factors that interfere with the natural passive release of PA#3. Jeff. |
|