|
|
Post by imperfectgolfer on Dec 13, 2023 0:35:58 GMT -5
I have expressed many negative opinions over many years regarding the golf instructional opinions expressed by many different golf instructors.
I am increasingly coming to the conclusion that the golf instructional opinions expressed by Marcus Bell could be the most bizarre that I have ever come across during my ~20 years of studying the golf swing action performed by pro golfers.
Jeff.
|
|
|
|
Post by imperfectgolfer on Dec 13, 2023 23:12:47 GMT -5
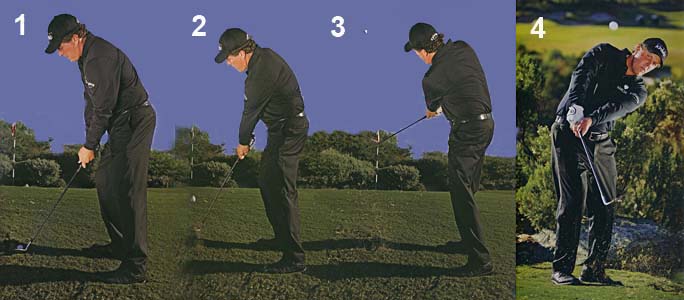
Here is another video featuring Marcus Bell's golf instructional approach. MB is presently visiting the USA as a guest of Brendon Devore and in this video he is working with another golf instructor called Eric. They are basically teaching a golfer how to hit chip shots that have a low, medium and high trajectory. MB talks about "intuition" and "external cues" and "feels" based on the sound of the club's bounce on the ground in order to get a student golfer to learn how to hit shots of varying ball height trajectory. My golf instructional approach is very different. My golf instructional approach is based on the fundamental laws of human golf biomechanics and golf physics. In other words, I study the problem from a theoretical perspective and I then work out how a golfer has to optimally move his arms/hands/body in order to hit a certain type of shot. So, let's start off with the problem of hitting a low trajectory chip shot. From a purely theoretical perspective, I know that one should hit the ball with more forward shaft lean so that the dynamic loft at impact will be less. To make the golf stroke more biomechanically practical and more consistent in terms of its repeatable execution, it makes sense to place the ball slightly further back towards the trail foot at address. It also makes sense to come into impact with a slightly bowed lead wrist (presuming a weak/neutral lead hand grip) where the hands will be ahead of the ball at impact. It also makes sense to use a DH-hand release action - as demonstrated by Eric's lead arm motion. It also makes sense that there must be more body rotation to get the trail hand to reach P7.4 with a still extended trail wrist that can better guarantee that a negative hand couple scenario is present through impact - and to avoid the problem of "running-out-of trail arm" before P7.4 the body obviously has to rotate more efficiently in order to get the trail shoulder far enough downplane. Now, consider how best to hit a high trajectory chip shot (eg. flop shot). It makes sense to place the ball more forward in one's stance at address and it makes sense that there should be minimal forward shaft lean at impact and where the bounce of the club is more exposed to the ground at impact. Note how Eric solves this problem in his "real life" golf swing action - he gets more wrist cock of his lead hand in his backswing action and he then does more of a flicking/flipping motion of his lead wrist through impact where he deliberately uses a non-DH hand release action where he allows his lead wrist to bend immediately post-impact causing the clubshaft to bypass his lead arm (from an angular rotational perspective). I think that his approach is sub-optimal because it introduces too much lead wrist motion through impact. It works very well for Eric because he has great hand-eye coordination skills. I much prefer the approach used by Phil Mickelson (which he describes in his book/video on the "Short Game"). Here are capture images from his book showing his approach to hitting a high trajectory chip shot. Image 1 shows that PM has placed the ball more forward in his stance so that at impact there will be less forward shaft lean and a greater amount of dynamic loft.
Note that he is using a DH-hand release action where he maintains an extended trail wrist to P7.4 which better guarantees a negative hand couple phenomenon through impact. Note how he gets his trail shoulder far enough downplane so that he does not "run-out-of-trail arm" before P7.4. Note how he uses a reverse roll motion of his lead arm between P7 => P7.4 so that he can keep the clubface consistently open through impact. Note that there is no timing-dependent motion of his lead wrist through impact. From a theoretical perspective, it makes much more sense to use PM's DH-hand release action technique for both low trajectory and high trajectory shots. MB's golf instructional approach, which is based on "intuition", external cues and exploratory "feels", did not get him to discover the rational logic of Phil Mickelson's more biomechanically sound approach. Jeff.
|
|
|
|
Post by dubiousgolfer on Dec 14, 2023 7:34:22 GMT -5
Dr Mann
With regards short pitch/chip shots, here is a video from Tyler Ferrell showing the creation of a long flat spot from about 1 inch behind the ball to about 6 inches post impact which seems to be an optimum requirement, but no biomechanical description as to how create it.
He does seem to imply at the end of the video that a golfer just using his left arm might create a longer flat spot than just using his right arm. But I think that is a flawed opinion because the ball position was too forward when the right arm was used because the pivot point of the swing was more or less nearer the right shoulder joint.
I am unsure whether there is a need for a trail hand negative couple in such short chip/pitch shots as I don't know whether there is any slight forward or backward bend of the shaft (but I'll investigate).
DG
|
|
|
|
Post by dubiousgolfer on Dec 14, 2023 8:51:24 GMT -5
Examples_of_Pitching_sequences.pdf (697.48 KB) The above attachment shows graphs from Rob Neal while the below are a sample of tour pro short pitching graphs by Jon Sinclair.  It does seem that the pelvis and thorax accelerate during the downswing and then stays constant into and through impact , although the lead arm slows down while the clubhead speed peaks just before impact. The lead arm doesn't seem to slow down at/post impact and sort of plateaus off , even increases slightly. DG
|
|
|
|
Post by imperfectgolfer on Dec 14, 2023 9:22:21 GMT -5
DG,
You wrote-: "I am unsure whether there is a need for a trail hand negative couple in such short chip/pitch shots as I don't know whether there is any slight forward or backward bend of the shaft (but I'll investigate)."
Adopting the technique of using a negative hand couple through impact for chipping has nothing to do with what is happening regarding the phenomenon of peripheral shaft bending (which only happens with a full swing action involving the full release of PA#2), and it simply helps to prevent any lead wrist flip-bending through impact.
I do not know how Rob Neal measures hand speed and arm speed so that he gets different results for those measurements.
I can learn nothing useful from Jon Sinclair's graphs. The lead arm motion is not pivot-driven in chipping or short iron shots <100 yards, and one would naturally expect lead arm and upper torso speeds to be similar in magnitude.
I learned nothing useful from Tyler Ferrell's video.
Jeff.
|
|
|
|
Post by dubiousgolfer on Dec 14, 2023 10:21:25 GMT -5
DG, You wrote-: " I am unsure whether there is a need for a trail hand negative couple in such short chip/pitch shots as I don't know whether there is any slight forward or backward bend of the shaft (but I'll investigate)."Adopting the technique of using a negative hand couple through impact for chipping has nothing to do with what is happening regarding the phenomenon of peripheral shaft bending (which only happens with a full swing action involving the full release of PA#2), and it simply helps to prevent any lead wrist flip-bending through impact. I do not know how Rob Neal measures hand speed and arm speed so that he gets different results for those measurements. I can learn nothing useful from Jon Sinclair's graphs. The lead arm motion is not pivot-driven in chipping or short iron shots <100 yards, and one would naturally expect lead arm and upper torso speeds to be similar in magnitude. I learned nothing useful from Tyler Ferrell's video. Jeff. You said " the phenomenon of peripheral shaft bending ( which only happens with a full swing action involving the full release of PA#2) In my opinion, the forward and backward bend of the shaft is a 'barometer' of whether the hands are applying a negative or positive torque at the grip and that phenomenon still applies whether it is a full swing or a short chip/pitch. When you say the lead arm motion is not pivot-driven, do you mean by the lower body? DG |
|
|
|
Post by imperfectgolfer on Dec 14, 2023 11:02:47 GMT -5
DG, You wrote-: " I am unsure whether there is a need for a trail hand negative couple in such short chip/pitch shots as I don't know whether there is any slight forward or backward bend of the shaft (but I'll investigate)."Adopting the technique of using a negative hand couple through impact for chipping has nothing to do with what is happening regarding the phenomenon of peripheral shaft bending (which only happens with a full swing action involving the full release of PA#2), and it simply helps to prevent any lead wrist flip-bending through impact. I do not know how Rob Neal measures hand speed and arm speed so that he gets different results for those measurements. I can learn nothing useful from Jon Sinclair's graphs. The lead arm motion is not pivot-driven in chipping or short iron shots <100 yards, and one would naturally expect lead arm and upper torso speeds to be similar in magnitude. I learned nothing useful from Tyler Ferrell's video. Jeff. You said " the phenomenon of peripheral shaft bending ( which only happens with a full swing action involving the full release of PA#2) In my opinion, the forward and backward bend of the shaft is a 'barometer' of whether the hands are applying a negative or positive torque at the grip and that phenomenon still applies whether it is a full swing or a short chip/pitch. When you say the lead arm motion is not pivot-driven, do you mean by the lower body? DG I disagree that the phenomenon of peripheral forward bending of the clubshaft is due to the presence of a negative/positive hand couple torque at the level of the club handle. It also happens in a golf robot's full golf swing action where no hand couple torque is being applied at the level of the club handle. I also think that it cannot happen to any significant degree if there is no PA#2 release happening, which is common when chipping. When I state that the lead arm is not being pivot-driven in chipping or very short iron shots - I am referring to both the pelvis and upper body. I think that the lead shoulder socket's forward motion is just perfectly synchronised with the forward motion of the lead arm.
Jeff.
|
|
|
|
Post by dubiousgolfer on Dec 14, 2023 12:31:57 GMT -5
You said " the phenomenon of peripheral shaft bending ( which only happens with a full swing action involving the full release of PA#2) In my opinion, the forward and backward bend of the shaft is a 'barometer' of whether the hands are applying a negative or positive torque at the grip and that phenomenon still applies whether it is a full swing or a short chip/pitch. When you say the lead arm motion is not pivot-driven, do you mean by the lower body? DG I disagree that the phenomenon of peripheral forward bending of the clubshaft is due to the presence of a negative/positive hand couple torque at the level of the club handle. It also happens in a golf robot's full golf swing action where no hand couple torque is being applied at the level of the club handle. I also think that it cannot happen to any significant degree if there is no PA#2 release happening, which is common when chipping. When I state that the lead arm is not being pivot-driven in chipping or very short iron shots - I am referring to both the pelvis and upper body. I think that the lead shoulder socket's forward motion is just perfectly synchronised with the forward motion of the lead arm.
Jeff.
When I look at Ping Man there is a collar around the grip which is the equivalent to having 'hands' gripping the club. I don't know for certain whether there is forward/backward bend on the shaft , but if there were, it would suggest a positive/negative torque being applied by that collar. DG |
|
|
|
Post by imperfectgolfer on Dec 14, 2023 19:30:02 GMT -5
I disagree that the phenomenon of peripheral forward bending of the clubshaft is due to the presence of a negative/positive hand couple torque at the level of the club handle. It also happens in a golf robot's full golf swing action where no hand couple torque is being applied at the level of the club handle. I also think that it cannot happen to any significant degree if there is no PA#2 release happening, which is common when chipping. When I state that the lead arm is not being pivot-driven in chipping or very short iron shots - I am referring to both the pelvis and upper body. I think that the lead shoulder socket's forward motion is just perfectly synchronised with the forward motion of the lead arm.
Jeff.
When I look at Ping Man there is a collar around the grip which is the equivalent to having 'hands' gripping the club. I don't know for certain whether there is forward/backward bend on the shaft , but if there were, it would suggest a positive/negative torque being applied by that collar. DG How can a collar produce a negative/positive torque if it is physically passive? Jeff. |
|
|
|
Post by dubiousgolfer on Dec 14, 2023 20:38:10 GMT -5
When I look at Ping Man there is a collar around the grip which is the equivalent to having 'hands' gripping the club. I don't know for certain whether there is forward/backward bend on the shaft , but if there were, it would suggest a positive/negative torque being applied by that collar. DG How can a collar produce a negative/positive torque if it is physically passive? Jeff. The centripetal force via the PingMan's arm will cause the COM of the club (which is positioned behind the shaft) to move forward and align itself with that force. That will bend the shaft forward and cause the grip end to apply a positive torque on the collar, which will reactively apply a negative torque on the grip. Alternatively If Pingman has some stopper to prevent the shaft jackknifing at P4 and then angularly accelerates its arm incredibly fast , that stopper will create a positive torque via the collar onto the grip which will cause backward bend of the shaft such that it will not have time to straighten or have forward bend by impact (ie. by the centripetal pull force mentioned above). In which case the residual backward bend of the shaft will cause the grip to apply a negative torque on the collar , which will reactively apply a positive torque on the grip. The backward bend with positive torque applied via the collar on the grip might be possible in the swings of very strong long drivers , but I can imagine PingMan can swing a lot faster. Therefore it's very possible that there could be backward shaft bend if it was programmed to swing very fast. DG |
|
|
|
Post by imperfectgolfer on Dec 14, 2023 22:53:01 GMT -5
How can a collar produce a negative/positive torque if it is physically passive? Jeff. The centripetal force via the PingMan's arm will cause the COM of the club (which is positioned behind the shaft) to move forward and align itself with that force. That will bend the shaft forward and cause the grip end to apply a positive torque on the collar, which will reactively apply a negative torque on the grip. Alternatively If Pingman has some stopper to prevent the shaft jackknifing at P4 and then angularly accelerates its arm incredibly fast , that stopper will create a positive torque via the collar onto the grip which will cause backward bend of the shaft such that it will not have time to straighten or have forward bend by impact (ie. by the centripetal pull force mentioned above). In which case the residual backward bend of the shaft will cause the grip to apply a negative torque on the collar , which will reactively apply a positive torque on the grip. The backward bend with positive torque applied via the collar on the grip might be possible in the swings of very strong long drivers , but I can imagine PingMan can swing a lot faster. Therefore it's very possible that there could be backward shaft bend if it was programmed to swing very fast. DG I regard your explanation as being implausible. I cannot perceive a situation where a passive object (eg. clamp holding the club handle in a golf robot machine) can be applying an active torque. Jeff. |
|
|
|
Post by dubiousgolfer on Dec 15, 2023 8:44:14 GMT -5
The centripetal force via the PingMan's arm will cause the COM of the club (which is positioned behind the shaft) to move forward and align itself with that force. That will bend the shaft forward and cause the grip end to apply a positive torque on the collar, which will reactively apply a negative torque on the grip. Alternatively If Pingman has some stopper to prevent the shaft jackknifing at P4 and then angularly accelerates its arm incredibly fast , that stopper will create a positive torque via the collar onto the grip which will cause backward bend of the shaft such that it will not have time to straighten or have forward bend by impact (ie. by the centripetal pull force mentioned above). In which case the residual backward bend of the shaft will cause the grip to apply a negative torque on the collar , which will reactively apply a positive torque on the grip. The backward bend with positive torque applied via the collar on the grip might be possible in the swings of very strong long drivers , but I can imagine PingMan can swing a lot faster. Therefore it's very possible that there could be backward shaft bend if it was programmed to swing very fast. DG I regard your explanation as being implausible. I cannot perceive a situation where a passive object (eg. clamp holding the club handle in a golf robot machine) can be applying an active torque. Jeff. Lift a simple light chair vertically by it's top rail and feel what it does to your hand. It will rotate so that its COM will align with the lifting force, but you will also feel that it is trying to rotate your hand/wrist. If it's trying to rotate/torque your hand, your hand will also , by Newtons 3rd Law , reactively apply an equal and opposite torque on the top rail. DG |
|
|
|
Post by imperfectgolfer on Dec 15, 2023 8:56:03 GMT -5
I regard your explanation as being implausible. I cannot perceive a situation where a passive object (eg. clamp holding the club handle in a golf robot machine) can be applying an active torque. Jeff. Lift a simple light chair vertically by it's top rail and feel what it does to your hand. It will rotate so that its COM will align with the lifting force, but you will also feel that it is trying to rotate your hand/wrist. If it's trying to rotate/torque your hand, your hand will also , by Newtons 3rd Law , reactively apply an equal and opposite torque on the top rail. DG I think that the hand may rotate as result of the COM not being aligned with the lifting force. However, a reactive Newton's 3rd law force will not apply if the hand does not resist the twisting force and if it is simply allowed to rotate. I can understand that the hand will be generating a torque if it tries to resist the twisting force. However, that analogy also does not apply to a clamp that simply holds a club handle in a Golf Robot machine. Jeff. |
|
|
|
Post by dubiousgolfer on Dec 15, 2023 10:12:04 GMT -5
Lift a simple light chair vertically by it's top rail and feel what it does to your hand. It will rotate so that its COM will align with the lifting force, but you will also feel that it is trying to rotate your hand/wrist. If it's trying to rotate/torque your hand, your hand will also , by Newtons 3rd Law , reactively apply an equal and opposite torque on the top rail. DG I think that the hand may rotate as result of the COM not being aligned with the lifting force. However, a reactive Newton's 3rd law force will not apply if the hand does not resist the twisting force and if it is simply allowed to rotate. I can understand that the hand will be generating a torque if it tries to resist the twisting force. However, that analogy also does not apply to a clamp that simply holds a club handle in a Golf Robot machine. Jeff. Yes, that could be correct if the club and clamp were rigid objects and the 'club/clamp' envisaged as one rigid solid object. In physics a rigid object is non deformable, so if there were some sort of padding/damping between the clamp and club's grip , and the shaft not a rigid object (which we know it isn't because it flexes), the physics becomes more complex. DG |
|
|
|
Post by dubiousgolfer on Dec 15, 2023 10:30:48 GMT -5
Here is an interesting video showing Iron Byron swing vs Tiger Woods in slow motion. It seems that the shaft is in backward bend for Iron Byron compared to forward bend for TW approaching impact.
I don't know whether each video was slowed down differently to make the positions match because there isn't a footage showing the swings at full speed. It could be that Iron Byron's swing was much faster than TW.
Addendum: There could be another reason for the difference in shaft bend , and that is the friction in the 'wrist' pivot joint between Iron Byron and TW. I can imagine Iron Byron pivot joint being almost frictionless compared to TW's real wrist joints. If that is the case, then TW's wrist joints cannot keep up with the increase in the angular velocity of the club, therefore causes a negative couple at the grip and a larger increase in forward shaft bend.
DG
PS. I've now found the real time Iron Byron video that was used in that slow motion comparison . It is incredibly fast and seems likely the reason for the backward bend of the shaft approaching impact. As the arm is angularly accelerated , the inertia of the clubhead or/and the stopper is causing the backward bend of the shaft and there just isn't enough time for it to straighten by impact.
|
|